La mécanique
Par hephaistos, samedi 17 décembre 2005 à 12:11 :: Notre robot :: #9 :: rss

Bienvenue dans le monde merveilleux de la mécanique!
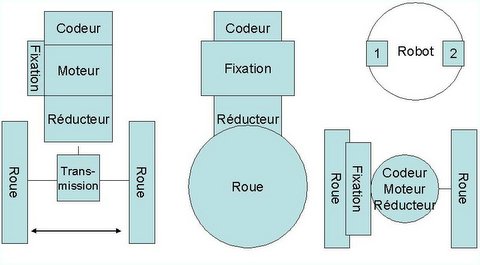
Le plan général du robot:
 La propulsion:
La propulsion:
- Principes :
- Roues espacées d’au moins 4 cm pour ne pas tomber dans les troues
- Moteur vertical pour optimiser l’espace
- Principe du char : 2 jeux de 2 roues
L'aspiration:
- Principes :
- Aspire les balles sur la table
- Aspire les balles dans les trous
- Respecte la limite physique de 14 balles
- Utilise un moteur d’aspirateur à main
- Utilisation de tuyau PVC d’évacuation diamètre 50 mm
- Un système d’engrenage permet de rendre mobile deux trappes avec 1 servo moteur pour :
- soit aspirer
- soit faire descendre la balle vers le barillet
- Une des trappes est tjrs ouverte et l’autre et tjrs fermée … (ici le dessin est donc faux ..)
- Un grillage stoppe la balle. Avant la descente, un capteur nous indique s’il y a une balle ou non et sa couleur
- Comment éjecter une balle ???
- Le moteur d'aspiration:
- Le principe est donc d'utiliser un moteur d'aspirateur à main.
- Problèmes:
- Comment fixer le moteur ?
- Comment raccorder un tuyau en limitant les pertes au niveau de la turbine ?



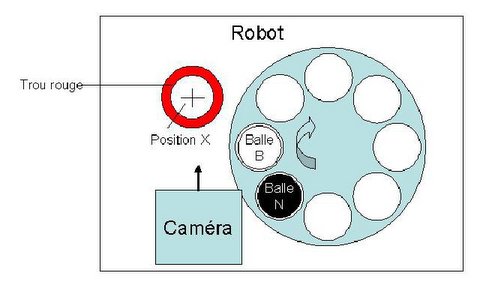
Le barillet à balles:
- Principes:
- Cylindre rotatif percé de 8 trous commandé par un moteur asservi
- Arrivée d’une balle dans l’aspiration
- Détection de la couleur
- Rotation du barillet pour présenter un espace vide
- Rotation des trappes
- Descente de la balle et stockage de la couleur en mémoire
- La WebCam voit que le robot passe sur un trou
- Identification (bleu/rouge) et calcul de la position exacte du trou sous le robot
- Rotation du barillet pour présenter la balle de la bonne couleur au-dessus du trou
- La balle tombe et c’est le BBBBBBBUUUUUUUUTTTTTTTTTT
- Remarque:
- La WebCam ne voit que l’intérieur du robot pour éviter les perturbations.
- Problèmes:
- Mécanisme d’entraînement ?
- Mécanisme pour conserver la distance au sol ?
- Position de la caméra dans le robot pour que les mesures soient précises et que la cam ne soit pas génée par l’aspiration.

Les capteurs analogiques:
- Principes :
- Il y a 4 capteurs
- Chaque capteur permet de détecter soit un robot, soit un totem, soit une bordure,soit une balle.
- La comparaison des distances nous informe de l’obstacle qui est devant nous

Les capteurs de contact:
- Principes :
- Savoir en cas de collision comment éviter l’obstacle
- Ne pas écrabouiller les balles
- Donner au robot une forme hexagonale
- A base de microswitch (exemple chez lextronic : http://www.lextronic.fr/connectique/C116.pdf)
- Protection anti arrachage !
- Un switch par face/direction
- On ne doit pas détecter les collisions avec les balles libres !



Commentaires
1. Le mardi 11 juillet 2006 à 23:33, par pilpoil
Ajouter un commentaire
Les commentaires pour ce billet sont fermés.